Blackbird Bipedal Robot: Model-Predictive Control demo
Heuristic Walking Control
Bipedal Walking in PyBullet: Disturbance Rejection/3D Control
Bipedal Walking in PyBullet (Spring-Loaded Inverted Pendulum)
Bipedal Walking in PyBullet (Spring-Loaded Inverted Pendulum)
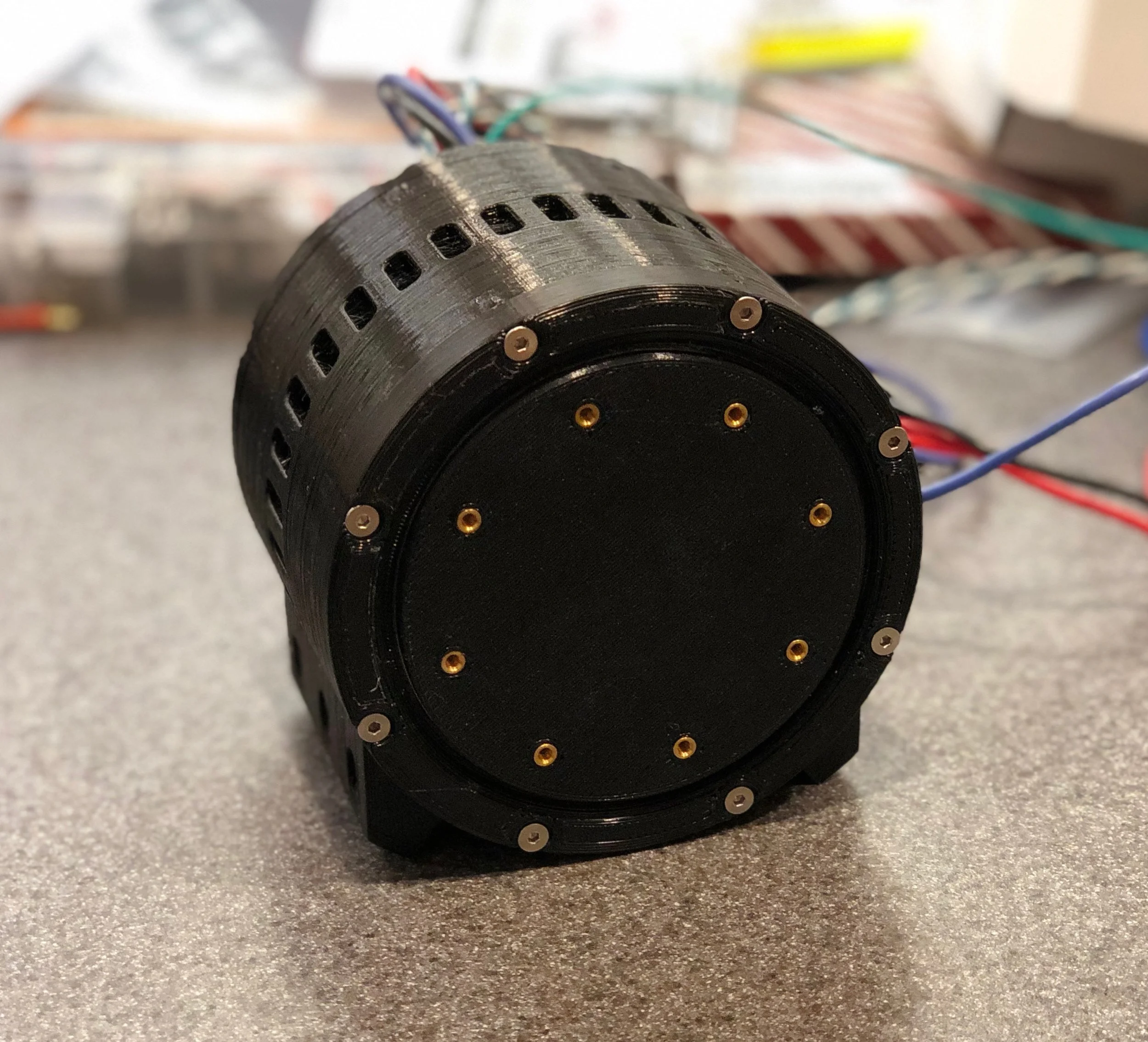
High-Power Linear Actuator
I designed this linear actuator with the intent of using it a walking robot. It’s very lightweight due to its carbon-fiber construction, yet it can exert forces in excess of 900 N.